Publications
All
2025
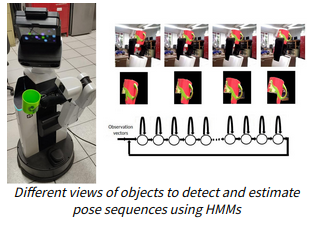
Multi-View Object Recognition and Pose Sequence Estimation Using HMMs
Journal of Robotics and Mechatronics
·
20 Jun 2025
·
doi:10.20965/jrm.2025.p0579
Complex Task Planning for General-Purpose Service Robots
Journal of Robotics and Mechatronics
·
20 Jun 2025
·
doi:10.20965/jrm.2025.p0594
2024
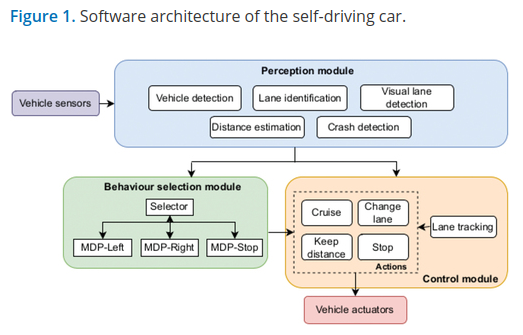
Autonomous Behavior Selection For Self-driving Cars Using Probabilistic Logic Factored Markov Decision Processes
Applied Artificial Intelligence
·
11 Mar 2024
·
doi:10.1080/08839514.2024.2304942
2023
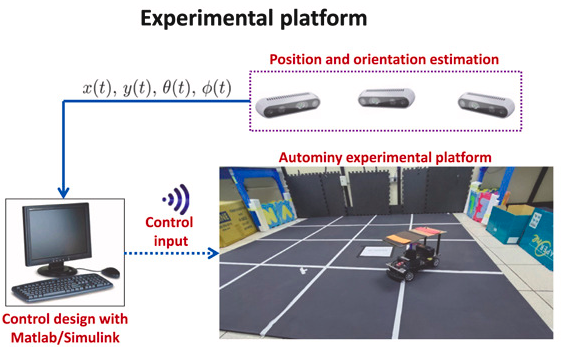
Trajectory tracking nonlinear
controller for wheeled mobile robots with disturbances observer
ISA Transactions
·
01 Nov 2023
·
doi:10.1016/j.isatra.2023.07.037

Fail It till You Make It: Error Expectation in Complex-Plan Execution for Service Robots
Lecture Notes in Computer Science
·
01 Jan 2023
·
doi:10.1007/978-3-031-43111-1_4
2022
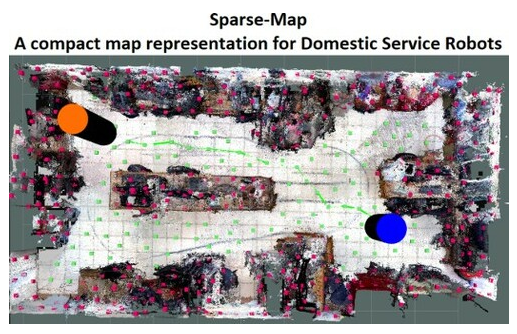
Sparse-Map: automatic topological map creation via unsupervised learning techniques
Advanced Robotics
·
30 Aug 2022
·
doi:10.1080/01691864.2022.2114296
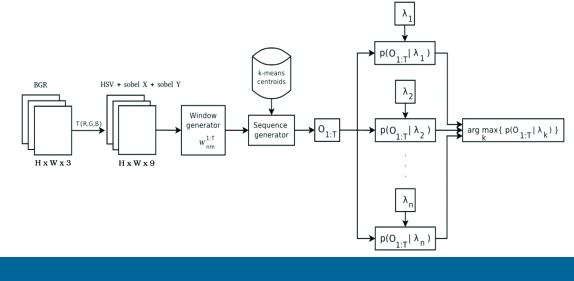
Multiview Object and View Sequence Recognition using Hidden Markov Models
2022 IEEE 18th International Conference on Automation Science and Engineering (CASE)
·
20 Aug 2022
·
doi:10.1109/case49997.2022.9926680
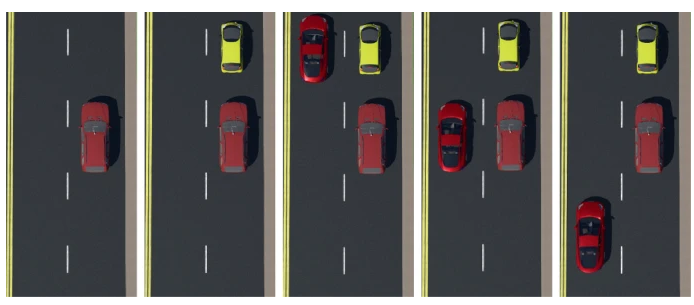
Probabilistic Logic Markov Decision Processes for Modeling Driving Behaviors in Self-driving Cars
Lecture Notes in Computer Science
·
01 Jan 2022
·
doi:10.1007/978-3-031-22419-5_31
2019
Semantic reasoning in service robots using expert systems
Robotics and Autonomous Systems
·
01 Apr 2019
·
doi:10.1016/j.robot.2019.01.007
2018
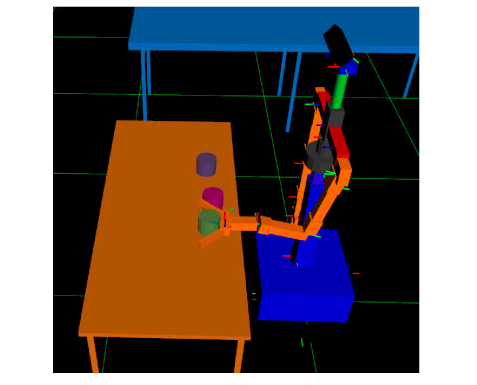
A Motion-Planning System for a Domestic Service Robot
SPIIRAS Proceedings
·
01 Oct 2018
·
doi:10.15622/sp.60.1